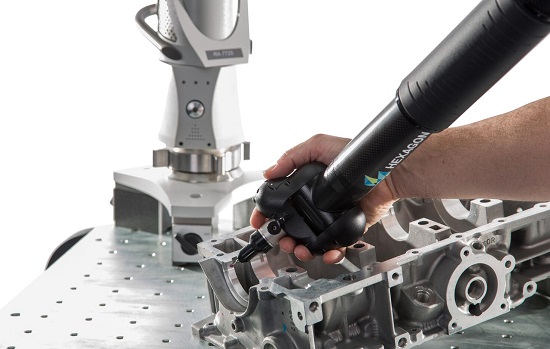
ROMER 絕對(dui)關節臂的核心(xin)技術是建立在(zai)目前已有數以(yi)萬計投👨来玩吧12122🔞4中字㊙️❤️👨入現🛀🏻實(shí)生産的ROMER 關(guān)節臂成功經驗(yan)基礎上。創新地(di)采用HEXAGON 計量(liàng)産業集團内成(cheng)熟的技術。集積(jī)累與創造于一(yi)身,ROMER 絕對關(guān)節臂以最小的(de)風險提供了最(zuì)大的創新。
1.絕對(dui)編碼器-開(kai)機即可測量
ROMER 絕對關(guan)節臂是世界上(shàng)第一款擁有絕(jué)對編碼器的🔞關(guan)節臂測量🛀機,臂(bì)身的各個部分(fèn)總能“知道(dao)”它的準确(que)位置。該技術消(xiāo)除了之前對編(biān)碼器複位的要(yao)求。現在,用戶啓(qǐ)動設備即可開(kāi)始測量。
2.絕對靈(líng)活
全新的(de)ROMER模塊(kuài)包集成了便攜(xie)式關節臂測量(liàng)機的全部擴展(zhan)功能,利用通用(yòng)的對接端口連(lián)接到臂身底座(zuo),在需要的情況(kuàng)下可以對功能(néng)包進行添加,删(shān)除,或更改設置(zhi)。随着新的模塊(kuai)包的發布,絕對(dui)臂可在現場輕(qīng)松完成升🏃🏻♂️級與(yu)增加新功能。
6軸絕對(duì)關節臂的模塊(kuai)化設計:
移(yi)動模塊:集成可(ke)充電電池和Wi-Fi 無限傳輸功(gong)能,實現了絕對(dui)臂在生産現場(chǎng)的完全無線使(shi)用。
3. RDS - ROMER 軟件接口
作爲ROMER關節臂通訊(xun)和診斷軟件,RDS 可方便的運(yùn)行于Windows 平台(tái)進行現場調試(shi)。這樣直觀的操(cao)作軟件方便了(le)🚩測頭校驗和測(cè)量精度校準,符(fú)合國際标準。
4.更(gèng)輕,剛性更好,更(gèng)準确
新一代太空時(shi)代技術的碳素(sù)纖維臂身到雙(shuāng)耦合連接器,絕(jué)對臂是ROMER 有(yǒu)史以來重量最(zuì)輕的,剛性最好(hao)的關節臂。2.5 米的關節臂僅(jǐn)重5公斤,重(zhòng)量僅爲同類2.4 米的關節臂(bì)的80%。與絕對(dui)編碼器相結合(he)使得精度更高(gāo),這也是目前HEXAGON 計量産業集(ji)團精度最高的(de)關節臂。
5.HP-L-8.9激光測(cè)頭

HP-L-8.9 Laser Scanner激光掃(sao)描測頭爲ROMER六軸絕對臂而(er)設計,測頭可以(yǐ)掃描亮度較高(gāo)的金屬以及黑(hēi)色零件。并獲取(qu)大量點雲數據(jù),可實現工🤩件去(qù)曲面色差分析(xī)(與CAD比對),特(te)征尺寸檢測,以(yi)及逆向工程的(de)快速數字化等(děng)。
HP-L-8.9 LASER SCANNER主要具備(bei)以下特點:
1. 人性化設計,無附加控制(zhì)器系統。
2. 使(shi)用TESA 标準接(jiē)口,易于安(ān)裝和更換,僅需(xū)一次校驗
3. 基于TESA接口(kou)及功能模塊包(bao)的開放式開發(fā)集成平台
4. 大量的點雲數(shù)據采集能夠快(kuai)速完成工件的(de)數字化
典(dian)型的測量應用(yong):
钣金(jīn)件
沖壓件(jian)
模型配件(jian)
模具
結構和裝飾五(wu)金
複合材(cái)料
機加工(gong)件
管件及(jí)其組件
車(chē)身和底盤
玻璃纖維結構(gou)
典型(xíng)行業:
汽車及其零部(bu)件制造商
汽車内飾
航天零部件制(zhi)造商
重型(xing)設備及其零部(bù)件制造商
船舶和造船
機械制造
家具制造業(ye)
土木工程(chéng)
風電及其(qi)零部件制造商(shāng)
器械
ROMER 絕對關節臂測(cè)量機的參數信(xìn)息:
1.ROMER 絕對關(guan)節臂測量機73系(xì)列和75系列能提(ti)供7種臂長、13款機(ji)型。
2.機器重(zhong)量僅爲同類關(guān)節臂的80%。
3.是(shì)目前ROMER 精度最高(gāo)的關節臂。
4.測量精度依據(ju)B89.4.22 和 VDI/VDE 2617-9标準。
ROMER 絕(jué)對關節臂的技(ji)術優勢:
1. ROMER 獲(huo)得專利的主軸(zhóu)無限旋轉技術(shù),能夠方便的檢(jian)測其☔它測🈲量手(shou)🎯段難以觸及的(de)區域。
2. 最牢(láo)固的把手設計(ji)便于取出及定(dìng)位關節臂。
3. Zero-G平衡杆系統大(dà)大減少了操作(zuò)員的疲勞,機器(qi)在各位置🌏均很(hěn)容易達到平衡(heng)。
4. SpinKnob 根據人體(ti)工學設計,減少(shao)了負載及摩擦(cā)。
5. ROMER 标準基座(zuò)和各種基座選(xuan)項 。
6. 第(di)一款擁有絕對(duì)編碼器的便攜(xie)式測量機。
7. 集熱穩定及剛(gang)性于一身的新(xīn)一代碳素纖維(wei)臂身。
8. 新的SpinGrip無限旋轉(zhuǎn)把手更好的符(fú)合人體工程學(xué)設計。降低💁操作(zuò)員的疲勞,尤其(qi)是針對長臂。
9. 腕臂上人性(xìng)化的LED工作燈和(hé)數碼相機。
10. 橋式機精度等(deng)級的新型TKJ接口(kǒu),重複性更高,即(jí)插即用。并且軟(ruǎn)件可以自動識(shi)别測頭。